29 września 2022 - Tom Opio
Featured in: Informacje o produktach i technologii, Tech tip, Detekcja intruza
Seria czujek LiDAR REDSCAN Pro, zgodna z protokołem ONVIF, umożliwia tworzenie alarmów opartych na określonych kryteriach lub algorytmie detekcji. Alarmy mogą występować w przypadku wykrycia celu w kolejnych strefach lub w wielu strefach jednocześnie. Jedną ze stref można skonfigurować jako „strefę oceny”, a drugą jako „strefę alarmową”. Dzięki tej funkcji czujka REDSCAN Pro generuje inteligentne alarmy dynamicznie, śledząc stan zarówno „strefy oceny”, jak i „strefy alarmowej”.
Getting started: Zones allocation for dynamic event filtering.
The zones are separated by letters and numbers, A for alert zone and B for the judgment zone.
To set the alert zone, choose from: A11, A12, A21 or A22.
To set the judgement zone, choose from: B11, B12, B21 or B22

Przygotowanie: przypisanie stref dla dynamicznego filtrowania zdarzeń
Strefy są oznaczone literami i cyframi: A oznacza strefę alarmową, a B strefę oceny.
- Aby ustawić strefę alarmową, należy wybrać: A11, A12, A21 lub A22.
- Aby ustawić strefę oceny, należy wybrać: B11, B12, B21 lub B22
Do czego może służyć dynamiczne filtrowanie zdarzeń i jak je skonfigurować
Istnieje wiele zastosowań dynamicznego filtrowania zdarzeń, a każde z nich wymaga pewnej konfiguracji. W artykule omówiono najbardziej powszechne z nich.
Śledzenie kierunku ruchu
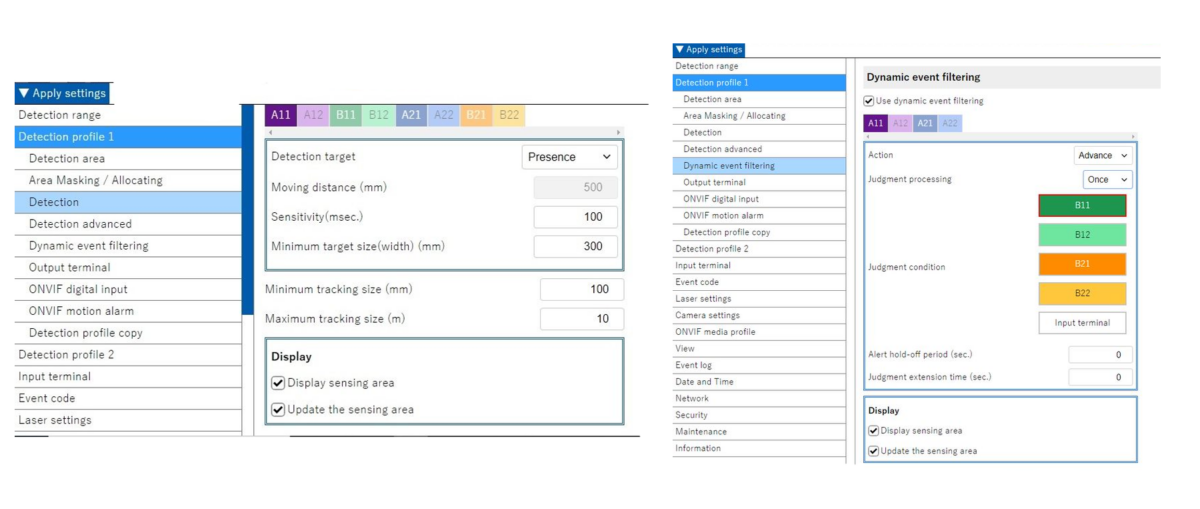
Jeśli w danym miejscu ruch może przebiegać tylko w jedną stronę, czujka REDSCAN Pro pozwala na generowanie alarmów w przypadku wykrycia ruchu w niepożądanym kierunku, natomiast przemieszczanie się obiektów w pożądaną stronę nie powoduje alarmu. Przykładem takiego zastosowania jest jednokierunkowy pasaż dla pieszych prowadzący do wyjścia.
W takim zastosowaniu czujka REDSCAN Pro jest instalowana poziomo, a strefy alarmu i oceny są przyporządkowane tak, aby spełnić wymagania dotyczące danego terenu. Jako cel detekcji dla strefy alarmu i oceny należy ustawić „obiekt ruchomy”, a następnie wprowadzić ustawienia z tabeli poniżej:

| Event filter | Directional tracking protection |
| Mount mode | Horizontal |
| Detection target | Mobile object |
| Action | Advance |
| Judgement processing | Once |
| Alert hold-off period | Any value as required |

REDSCAN Pro is installed in horizontal mount and the alarm and judgment zones are allocated to suit the site requirement. Set detection target for both alarm and judgment zones to ‘mobile object’ then apply the setting as in the table below:
Alarmy o niepowołanym wejściu pod nieobecność pracownika ochrony
W tym przypadku wygenerowanie alarmu jest konieczne, gdy osoba wejdzie do strefy, w której nie przebywa pracownik ochrony. Alarm nie wystąpi, gdy pracownik ochrony będzie obecny.
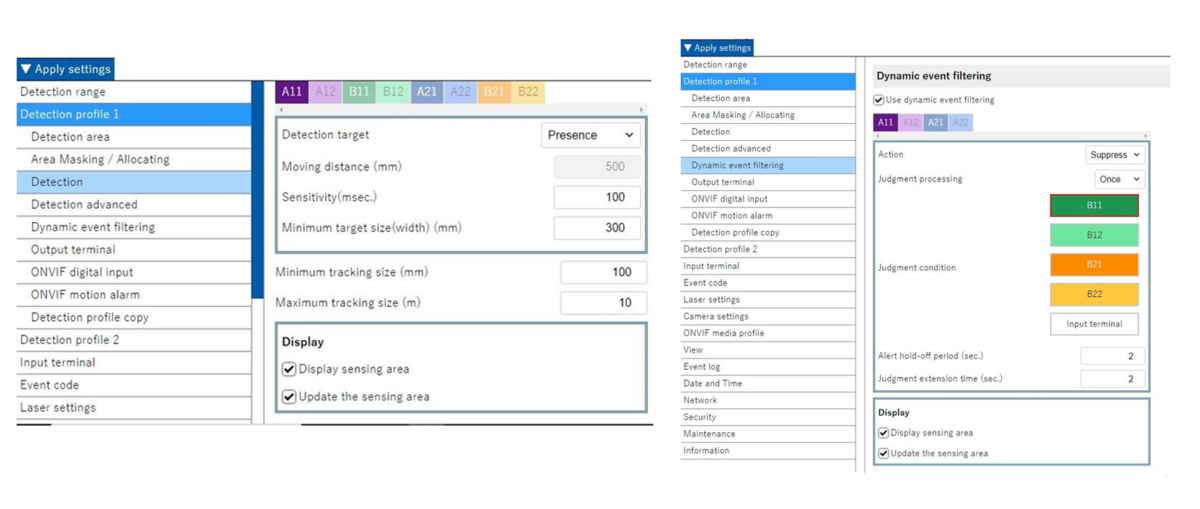
Czujka REDSCAN Pro jest montowana poziomo. Ustawiamy obszar przebywania pracownika ochrony jako strefę oceny, a obszar wejścia jako strefę alarmu. Cel detekcji w strefie alarmu i strefie oceny należy ustawić na „obecność” oraz zastosować parametry dynamicznego filtrowania zdarzeń wskazane poniżej.

| Event filter | Guard absence protection |
| Mount mode | Horizontal |
| Detection target | Presence |
| Action | Suppress |
| Judgement processing | Always |
| Alert hold-off period | Any value as required |
| Judgement time | Any value as required |

REDSCAN Pro is mounted horizontally and we set the security guard standing area as judgement zone and entry area as an alert zone. Both alert and judgment zone detection target need to be set to ‘presence’ and apply dynamic event filtering settings as below
Minimalna wymagana wysokość przy doku przeładunkowym
W tym zastosowaniu alarm jest generowany, gdy niewielki pojazd lub furgonetka znajdzie się przy doku przeładunkowym; brak alarmu w przypadku dużych ciężarówek. Czujka REDSCAN Pro jest montowana pionowo, tworząc wirtualną ścianę równoległą do bram doków.
Obszar powyżej minimalnej wymaganej wysokości należy ustawić jako „strefę oceny”, a obszar poniżej minimalnej wysokości jako „strefę alarmu”. Aby uniknąć fałszywych wzbudzeń wywołanych przechodzeniem pracowników przez obszar detekcji, minimalny rozmiar celu powinien być ustawiony na odpowiednio dużą wartość. Pozwala to uniknąć alarmu w przypadku, gdy osoba wejdzie na obszar monitorowany przez czujkę.

| Event filter | Minimum height requirement |
| Mount mode | Vertical |
| Detection target | Presence |
| Action | Suppress |
| Judgement processing | Once |
| Alert hold-off period | Any value as required |
| Judgement extension time | Greater than 2 |

The area above the minimum required height is set as ‘judgment zone’ and area below the minimum height as ‘alert zone’. To avoid false alarms by staff walking through the detection area, the minimum target size can be set to be reasonably large to ensure the there is no alert when a person walks past this point.
Ochrona tunelu
Funkcja dynamicznego filtrowania czujki REDSCAN Pro może być wykorzystana do zabezpieczenia wejścia do tunelu kolejowego, co powoduje alarm w przypadku wkroczenia osoby do tunelu. Alarm jednak nie jest generowany w przypadku wjazdu pociągu. Czujkę REDSCAN Pro można zamontować pionowo, tworząc wirtualną bramę na wjeździe do tunelu.
Minimalny rozmiar celu detekcji ustawia się na odpowiednio niską wartość, aby wykryć osobę, a jego maksymalny rozmiar powinien uwzględniać szerokość pociągu. Obszar na wysokości powyżej 2 m ustawiamy jako „strefę oceny”, a obszar w świetle tunelu poniżej 2 m jako „strefę alarmu”. Parametr wydłużenia oceny służy do wstrzymywania alarmu przez krótki czas, w którym czoło pociągu zostaje wykryte w strefie alarmu zanim górna część pociągu znajdzie się w obszarze oceny.

| Event filter | Tunnel protection |
| Mount mode | Vertical |
| Detection target | Presence |
| Action | Suppress |
| Judgement processing | Once |
| Alert hold-off period | Greater than 0 |
| Judgement extension time | Greater than 0 |

Judgement extension parameter is used to allow for a small time window when the nose of the train is detected in the alert area before the top of the train detection in the judgment area.
Ochrona zaparkowanego pojazdu
W tym zastosowaniu zachodzi konieczność ostrzegania o osobie zbliżającej się do miejsca, w którym zaparkowany jest samochód. Gdy nie ma samochodu, alarm nie powinien być generowany.
Czujka REDSCAN Pro jest montowana poziomo. Określamy miejsce, w którym zwykle parkowany jest samochód jako „strefę oceny”, a wszystkie strefy wokół zaparkowanego samochodu jako „strefę alarmu”. Zaleca się skonfigurowanie rozmiaru strefy oceny odpowiadającego parkowanemu samochodowi. Należy ustawić odpowiednio mały minimalny rozmiar celu, aby czujka wykryła osobę, i wystarczająco duży, aby uznała samochód jako cel.

| Event filter | Parked car protection |
| Mount mode | Horizontal |
| Detection target | Presence |
| Action | Advance |
| Judgement processing | Once |
| Alert hold-off period | Any value as required |
| Judgement time | Any value as required |

Set the minimum target size to be small enough to detect a person and large to include a car as a target.
Obejrzyj film o zastosowaniach dynamicznego filtrowania zdarzeń czujki LiDAR REDSCAN Pro
Dystrybutorzy
 Belgium
Belgium
 Bosnia and Herzegovina
Bosnia and Herzegovina
 Bulgaria
Bulgaria
 Croatia
Croatia
 Czech Republic
Czech Republic
 Hungary
Hungary
 Netherlands
Netherlands
 Polska
Polska
 Romania
Romania
 Serbia
Serbia
 Slovakia
Slovakia
 Slovenia
Slovenia
 Turkey
Turkey
-
(1) INTERFACH
Przejdź do strony (1) INTERFACH
alarmysklep.pl -
(1) Modern Alarm Ltd.
Przejdź do strony (1) Modern Alarm Ltd.
E:info@modernalarm.hu -
(2) FONEX
Przejdź do strony (2) FONEX
-
(2) Power Security Systems Ltd.
Przejdź do strony (2) Power Security Systems Ltd.
-
(3) NAPAD.PL
Przejdź do strony (3) NAPAD.PL
ALARM-TECH Systemy Zabezpieczeń -
(4) JANEX INTERNATIONAL
Przejdź do strony (4) JANEX INTERNATIONAL
-
(5) MONTERSI.PL
Przejdź do strony (5) MONTERSI.PL
E-SYSTEM -
(6) VOLTA SYSTEMY ZABEZPIECZEŃ
Przejdź do strony (6) VOLTA SYSTEMY ZABEZPIECZEŃ
-
(7) AAT SYSTEMY BEZPIECZEŃSTWA
Przejdź do strony (7) AAT SYSTEMY BEZPIECZEŃSTWA
-
(8) ELECTRONICS BOX
Przejdź do strony (8) ELECTRONICS BOX
-
(9) ARPOL
Przejdź do strony (9) ARPOL
-
10 ICS Polska
Przejdź do strony 10 ICS Polska
-
11 TECHGLOBAL
Przejdź do strony 11 TECHGLOBAL
-
12 PROMITEL
Przejdź do strony 12 PROMITEL
-
A.F.P.
Przejdź do strony A.F.P.
-
ADI Global
Przejdź do strony ADI Global
-
Alarm Automatika
Przejdź do strony Alarm Automatika
-
Alarmbg Ltd.
Przejdź do strony Alarmbg Ltd.
Tel. +359 9889994211 Email: info@alarmbg.com -
ATKM s.r.o.
Przejdź do strony ATKM s.r.o.
-
DSC Hungaria Kft.
Przejdź do strony DSC Hungaria Kft.
-
Euroalarm Spol. s r.o.
Przejdź do strony Euroalarm Spol. s r.o.
-
KAMIR alarm systems
Przejdź do strony KAMIR alarm systems
-
Koving
Przejdź do strony Koving
-
MOBICOM d.o.o.
Przejdź do strony MOBICOM d.o.o.
-
Network One Distribution
Przejdź do strony Network One Distribution
Tel.:+40 21 211 18 56 Email: security@nod.ro. -
SECPRAL COM SRL
Przejdź do strony SECPRAL COM SRL
Tel.:+40 0264 418 576 Email: comenzi.cluj@secpral.ro -
SIEL INVEST SRL
Przejdź do strony SIEL INVEST SRL
Tel.: +40 212 003 040 Email: vanzari@sielinvest.ro -
Slovak alarm
Przejdź do strony Slovak alarm
-
TEKNOLOJI
Przejdź do strony TEKNOLOJI
-
Tekra Ltd
Przejdź do strony Tekra Ltd
Tel.:+359 0700 110 10 Email.: csc@tekra.bg -
TELESYSTEM SRL
Przejdź do strony TELESYSTEM SRL
Tel.: +40 334 418 118 Email: bacau@telesystem.ro -
Topguard
Przejdź do strony Topguard
Sprendlingenstraat 18K, 5061 KN Oisterwijk, The Netherlands, tel. +31 88 2760900 -
Wesco | Anixter Belgium
Przejdź do strony Wesco | Anixter Belgium
Victor Dumonlaan 28, 2830 Willebroek, België, tel. +32 (0)3 860 47 00 -
Wesco | Anixter Nederland
Przejdź do strony Wesco | Anixter Nederland
Rivium Promenade 80, 2909 LM Capelle aan den IJssel, tel. +31 (0)10 288 5900